Exploitation sûre des véhicules automatisés sans conducteur
Exigences minimales selon l’ordonnance sur la conduite automatisée (OCA)

Avec l’entrée en vigueur, le 1er mars 2025, de la nouvelle ordonnance sur la conduite automatisée (OCA) [1], la Suisse dispose désormais de l’une des réglementations nationales les plus avancées au monde en matière de véhicules automatisés. L’OCA met en œuvre la révision de la loi sur la circulation routière (LCR) de 2023 et crée pour la première fois un cadre juridique national qui autorise la conduite automatisée de niveau 3 sur les autoroutes, les véhicules sans conducteur de niveau 4 sur des itinéraires définis et les systèmes de stationnement entièrement automatisés. Elle impose des normes élevées en matière de sécurité, de cybersécurité, d’homologation et d’obligations de déclaration, et stipule que les véhicules sans conducteur doivent être surveillés par des opérateurs basés en Suisse.
Les véhicules actuels n’étant pas encore homologués selon l’OCA, tous les projets de navettes et de logistique se poursuivent dans le cadre du régime des projets pilotes. L’OCA marque ainsi le passage des essais pilotes à une mobilité automatisée réglementée et évolutive.
Dans ce contexte, le projet de recherche «Minimum requirements for an authorisation to remotely drive automated vehicles in Switzerland» (MB4_20_02E_01) concrétise les bases techniques d’une surveillance et d’une intervention à distance sûres. Le projet a été soumis par SwissMoves dans le cadre du programme MB4 (Mobilité 4.0) de l’OFROU, lancé en avril 2023 et publié en février 2025 sous forme de rapport de recherche [2]. L’objectif consistait à définir et à valider des exigences minimales robustes et pratiques pour les systèmes d’opération à distance (Remote Operation Systems) afin de permettre une exploitation sûre et fiable des véhicules sans conducteur (figure 1).

Figure: Projet de recherche MB4_20_02E_01
Des exigences à la validation
Afin de créer une base solide, le consortium du projet (la HEIA-FR, la BFH, DTC Dynamic Test Center AG, CertX SA, Eraneos Switzerland AG et Loxo AG) a choisi une approche multidisciplinaire. À partir d’une base de données initiale d’environ 1000 exigences relatives au système d’opération à distance des véhicules automatisés, 247 exigences minimales prioritaires ont été sélectionnées. Celles-ci ont été systématiquement classées en trois catégories principales: les exigences basées sur les niveaux d’opération à distance (Remote Operation Level, ROL), qui définissent des fonctions spécifiques pour chaque niveau d’exploitation, les exigences basées sur des scénarios, qui traitent des défis réels tels que les pannes de réseau ou les dysfonctionnements des capteurs, ainsi que 193 exigences en matière de cybersécurité pour la protection contre les menaces internes et externes. Afin de garantir leur applicabilité pratique, ces exigences ont été validées au cours d’un processus en plusieurs étapes. Celui-ci comprenait des validations basées sur des scénarios, des tests expérimentaux sur une piste d’essai spécialisée et des tests de pénétration pour vérifier la cybersécurité.
Taxonomie, tests pratiques et tolérance à la latence
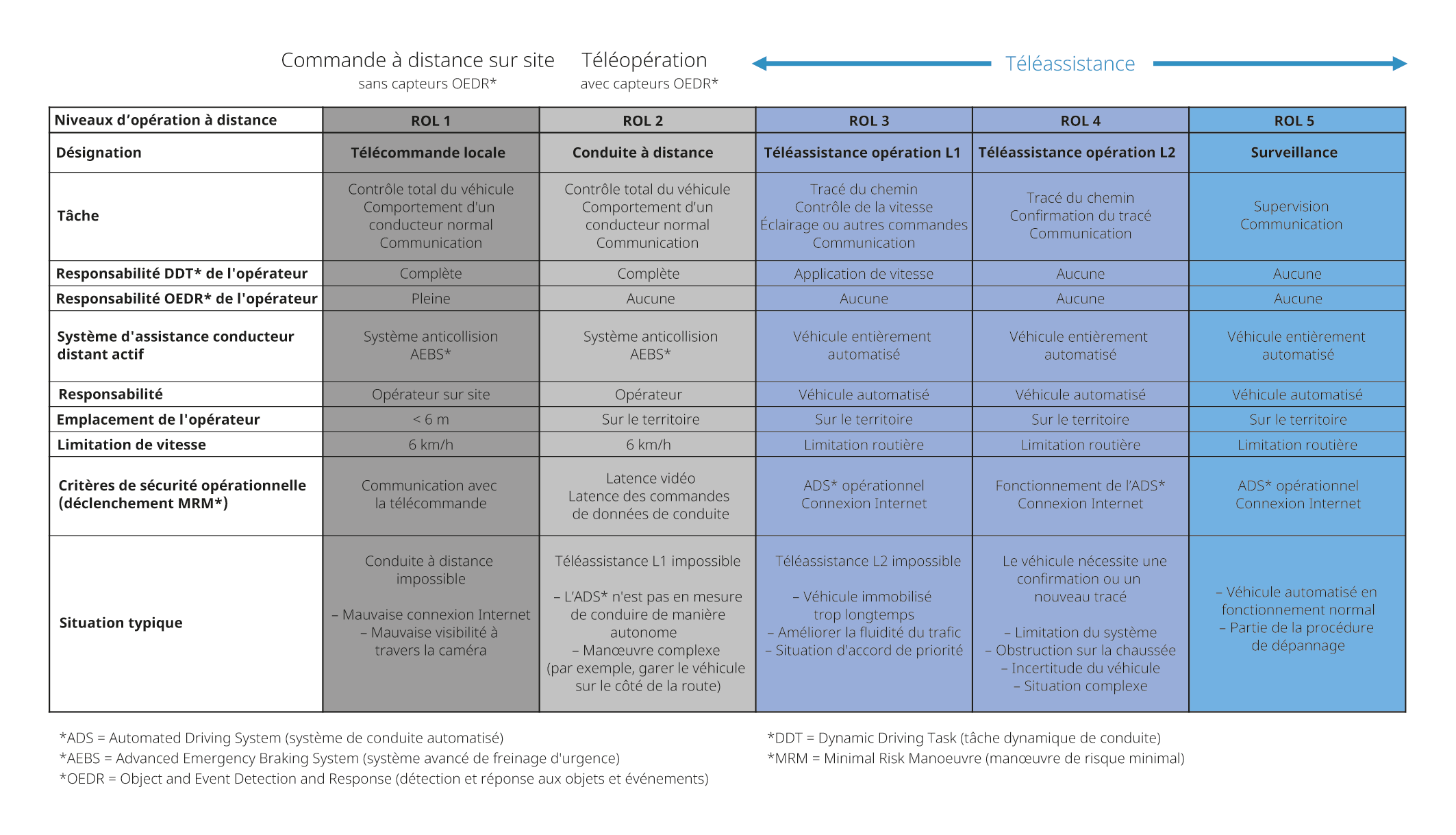
L’un des principaux résultats du projet est le développement d’une taxonomie complète des niveaux d’opération à distance, appelés «Remote Operation Levels» (ROL) (tableau 1). Cette classification en cinq niveaux (ROL 1 à ROL 5) établit une distinction claire entre l’opération avec télécommande locale (ROL 1), la conduite à distance directe via un réseau (téléopération, ROL 2), l’assistance à distance (téléassistance, ROL 3 et 4) et la simple surveillance (ROL 5). Cette classification est essentielle pour attribuer clairement les responsabilités des opérateurs et des systèmes, et permettre des interventions adaptées à la situation.
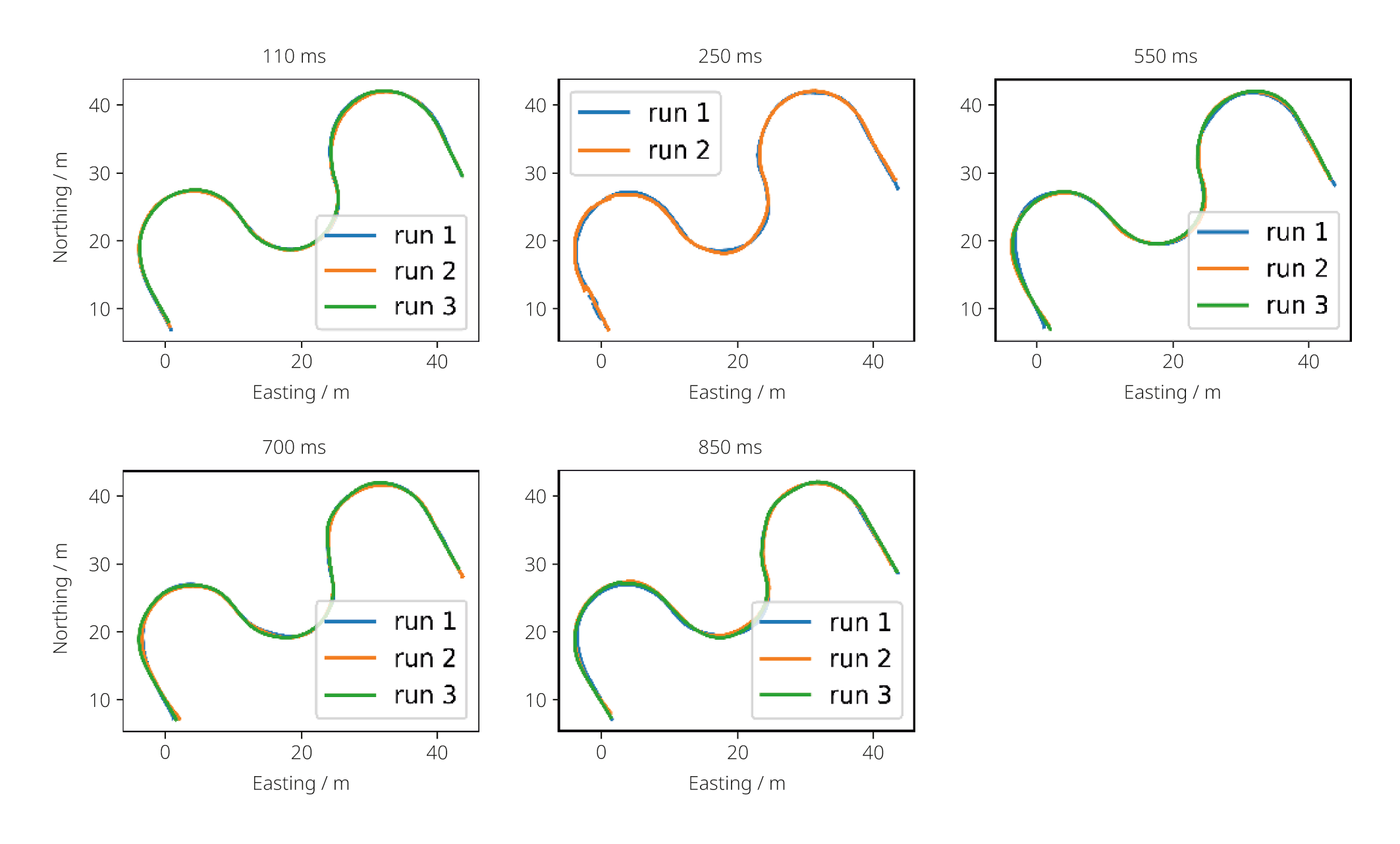
Des aspects critiques ont été examinés lors d’essais pratiques avec les véhicules Loxo Alpha et BFH Smartshuttle. Des tests de slalom ont montré que la maniabilité à basse vitesse (jusqu’à 6 km/h) reste stable même avec des latences réseau statiques pouvant atteindre 850 ms (figure 2). Cela prouve la faisabilité technique de la téléopération (ROL 2) dans des conditions réelles.
Les opérateurs ont décrit les scénarios à forte latence comme difficiles, mais maîtrisables avec une formation appropriée. Des scénarios tels que la détection d’obstacles «False Positive» , dans lesquels un véhicule s’arrête par erreur, ont également confirmé la pertinence pratique des exigences développées, car de telles situations ont pu être résolues efficacement par des interventions à distance.
Validation de la cybersécurité
La cybersécurité a constitué l’un des piliers essentiels du projet de recherche, car un système d’opération à distance ne peut être considéré comme sûr que si sa résilience aux cyberattaques est prouvée. Pour garantir cela, 193 exigences spécifiques en matière de cybersécurité ont été définies, basées sur des normes internationales telles que le règlement no 155 de l’ONU [3] et les normes ISO/IEC 27001 et ISA/IEC 62443.
La validation de ces exigences s’est faite à deux niveaux: alors que les exigences procédurales peuvent être validées par des audits organisationnels par rapport à des normes spécifiques, un test de pénétration rigoureux (Pentest) a été effectué pour vérifier la robustesse technique. Les tests se sont concentrés sur le véhicule Loxo Alpha 1 et la station d’opération à distance (Remote Operation Station) associée. Un acteur malveillant a été simulé afin d’attaquer les périmètres externes, internes et physiques des systèmes. Dans le cadre de tests de pénétration contrôlés, les objectifs suivants ont été poursuivis en fonction des principaux risques: tentative de compromettre les stations d’opération à distance, tentative de prendre le contrôle d’un véhicule et identification des vulnérabilités dans la conception de la sécurité. La méthodologie s’est appuyée sur des normes établies telles que MITRE ATT&CK et l’Open Worldwide Application Security Project (OWASP).
Dans le cadre du projet, 80 des 193 exigences ont été validées à l’aide de ce test de pénétration. Elles ont contribué à confirmer l’exhaustivité des exigences définies et ont démontré la résilience du système face aux menaces internes et externes. Le projet recommande donc d’intégrer des tests de pénétration réguliers dans le processus de gestion des risques liés à la cybersécurité.
Recommandations pratiques
Les résultats du projet fournissent une base technique et méthodologique directe pour la mise en œuvre de l’OCA. Les articles 34 à 43 de l’OCA, qui définissent les responsabilités, les qualifications et les conditions techniques pour l’exploitation de véhicules sans conducteur, sont notamment concrétisés par les exigences définies et la taxonomie ROL. Le projet crée ainsi une base scientifique pour l’homologation officielle des systèmes d’opération à distance.
Sept recommandations centrales ont été formulées à partir des conclusions. Elles comprennent la priorité accordée à la sécurité grâce à des connexions de communication stables et à la redondance, le développement continu de scénarios de test pour les environnements urbains complexes, et l’intégration de nouvelles technologies telles que la 5G pour améliorer l’évolutivité. L’accent est également mis sur la nécessité de mettre en place des programmes de formation et de certification structurés et standardisés pour les opérateurs, afin de garantir qu’ils puissent agir avec assurance même dans des situations critiques.
Projets en cours
Les domaines d’application prévus dans l’OCA sont déjà testés dans la pratique dans le cadre d’une série de projets pilotes. Ces initiatives fournissent des expériences précieuses pour l’intégration sûre de véhicules sans conducteur dans des environnements d’exploitation réels et procurent des informations importantes pour les nouvelles procédures d’autorisation.
À Berne, le projet Dynamic Micro Hub, de Loxo et Planzer, étudie comment un véhicule de transport autonome peut faciliter la distribution urbaine grâce à des transports intermédiaires automatisés. À l’aéroport de Zurich, WeRide exploite la première navette européenne de niveau 4 dans le cadre d’une exploitation aéroportuaire réelle, et collecte des données sur la surveillance à distance, la stabilité des liaisons radio et les réactions liées à la sécurité. Dans la vallée de la Furttal, STL, les CFF et le canton de Zurich testent un système interconnecté de navettes autonomes pour relier les communes locales aux transports publics. À Arbon, un véhicule de ligne automatisé de taille standard est exploité pour la première fois de manière régulière sous surveillance à distance, tandis que le projet de covoiturage AmiGo de CarPostal à Saint-Gall montre comment les véhicules autonomes à la demande peuvent compléter les transports publics.
D’autres projets étudient également des modèles d’utilisation futurs. Dans le canton de Zoug, la faisabilité de services de Ride-Hailing autonomes est analysée, tandis qu’à Genève, une flotte de navettes plus importante et un dépôt de bus automatisé sont testés, ouvrant de nouvelles possibilités pour les processus de stationnement, l’organisation de la flotte et la gestion du trafic d’exploitation.
Les hautes écoles apportent également une contribution importante au développement de ces technologies. À la Haute école spécialisée bernoise (BFH), des navettes automatisées basées sur des plateformes rétrofit sont exploitées afin de rechercher et de tester des composants logiciels pour le fonctionnement de niveau 4 et l’opération à distance. La Haute école d’ingénierie et d’architecture de Fribourg (HEIA-FR) collabore avec SwissMoves sur plusieurs projets de recherche et développement [4-6], notamment sur la logistique automatisée des marchandises, les applications agricoles et l’automatisation des dépôts de bus.
Ces projets soulignent l’importance de processus clairs, de liaisons de communication fiables et de mécanismes robustes pour les interventions à distance et la gestion des pannes. Ces thèmes jouent un rôle central dans le projet de directives de l’OFROU et sont soulignés comme particulièrement pertinents dans la prise de position de l’Association suisse pour la mobilité autonome SAAM.
Résumé et perspectives
Le projet de recherche MB4_20_02E_01 a, pour la première fois, créé une base technique pour l’exploitation sûre des systèmes d’opération à distance en définissant et en validant des exigences minimales. Il combine les exigences réglementaires de l’OCA avec une concrétisation technique de la manière dont les responsabilités, les qualifications, les mécanismes de sécurité et les exigences en matière de communication peuvent être mis en œuvre efficacement.
Les recommandations du projet identifient clairement les besoins en matière de développement: extension des scénarios, mise à jour technologique, gestion des latences variables, maintenance des exigences, qualification des opérateurs et harmonisation internationale. Le nouveau projet de recherche MB4_25_04B «System resilience needs with automated vehicles», avec le consortium HEIA-FR comprenant SwissMoves, CertX, Loxo, Sunrise, RB-Consulting et la Haute école de Kempten, s’inscrit directement dans la continuité de ce projet. Il s’agit d’étudier comment les centres de contrôle, les véhicules et les infrastructures peuvent être conçus de manière à être résilients face aux perturbations et de définir les processus d’escalade et de redémarrage. L’appel d’offres MB4_25_02J «Deployment of operators to monitor and support driverless vehicles» poursuit la recherche sur l’opération à distance. Sur la base du projet MB4_20_02E_01, des connaissances empiriques sur l’utilisation d’opérateurs dans l’exploitation d’une flotte évolutive doivent être acquises dans des conditions d’exploitation réelles, notamment dans le cadre du projet pilote «AmiGo» de CarPostal.
Il en résulte un lien cohérent entre le cadre de l’OCA, les activités de SAAM et SwissMoves, et la mise en œuvre technique par les projets MB4. La Suisse renforce ainsi son rôle de référence internationale en matière de mobilité automatisée responsable, sûre et éprouvée dans la pratique en Suisse.
Exploitation sûre des véhicules automatisés sans conducteur
Exigences minimales selon l’ordonnance sur la conduite automatisée (OCA)
Avec l’entrée en vigueur, le 1er mars 2025, de la nouvelle ordonnance sur la conduite automatisée (OCA), la Suisse dispose désormais de l’une des réglementations nationales les plus avancées au monde en matière de véhicules automatisés. L’OCA met en œuvre la révision de la loi sur la circulation routière (LCR) de 2023 et crée pour la première fois un cadre juridique national qui autorise la conduite automatisée de niveau 3 sur les autoroutes, les véhicules sans conducteur de niveau 4 sur des itinéraires définis et les systèmes de stationnement entièrement automatisés. Elle impose des normes élevées en matière de sécurité, de cybersécurité, d’homologation et d’obligations de déclaration, et stipule que les véhicules sans conducteur doivent être surveillés par des opérateurs basés en Suisse.
Les véhicules actuels n’étant pas encore homologués selon l’OCA, tous les projets de navettes et de logistique se poursuivent dans le cadre du régime des projets pilotes. L’OCA marque ainsi le passage des essais pilotes à une mobilité automatisée réglementée et évolutive.
Dans ce contexte, le projet de recherche «Minimum requirements for an authorisation to remotely drive automated vehicles in Switzerland» (MB42002E_01) concrétise les bases techniques d’une surveillance et d’une intervention à distance sûres. Le projet a été soumis par SwissMoves dans le cadre du programme MB4 (Mobilité 4.0) de l’OFROU, lancé en avril 2023 et publié en février 2025 sous forme de rapport de recherche. Sept recommandations centrales ont été formulées à partir des conclusions. Elles comprennent la priorité accordée à la sécurité grâce à des connexions de communication stables et à la redondance, le développement continu de scénarios de test pour les environnements urbains complexes, et l’intégration de nouvelles technologies telles que la 5G pour améliorer l’évolutivité. L’accent est également mis sur la nécessité de mettre en place des programmes de formation et de certification structurés et standardisés pour les opérateurs, afin de garantir qu’ils puissent agir avec assurance même dans des situations critiques.
Ceci pourrait également vous intéresser

